SuperDock M400 自动机场发布后,我们收到最多的评价是一个字:快。

最快 20 多秒起飞的极速响应,让很多客户在深入对比测试后,给出了几乎一致的反馈
"快,太快了。"
但今天我们不想聊"快"。
我们想聊聊"慢"。
聊聊为了把机场搬上车,我们走过的那段弯路。
CHAPTER 01
一个“看不上”的需求
很早以前,就有客户来问:
"能不能把机场放到车上?"
说实话,我们一开始觉得这不算什么刚需:既然车都开到现场了,司机直接下车,拿出遥控器飞个航线,几分钟的事,何必多此一举?
后来真有客户着急用,于是直接把固定版机场放皮卡上了,准备先用一段时间。
我们当时还挺自信,机场的结构设计足够稳固,车载运输的颠簸,在我们想象里,应该不是什么大问题。
事实证明,我们把这个想简单了。
CHAPTER 02
行业里的“皇帝新装”
机场上车没多久,坏消息就接踵而至:
⚠️ 云台的减振球总是爆开
⚠️ 无人机晃动严重
⚠️ 充电触点总是磨损

我们第一反应是:是不是个例?是不是老化?是不是使用姿势不对?
于是想当然地换成更大尺寸、更大负载的减振球。
能撑久一点,但最后,还是爆。
现在回头看,在没有搞清楚真实原因的情况下,头痛医头,脚痛医脚,是对工程最大的傲慢。
随后,我们去调研市面上其他做车载机场的厂家,想看看别人怎么解决的。
调研结果令人意外:绝大多数厂家,根本没做任何防护。
我们一度怀疑,是不是其他家用了什么奇思妙想,绕开了这些问题?
直到一位用过那些车载机场的客户(是的,又是一家踩过很多坑,最后才找到草莓的)说了实话:
"那些车载机场确实问题很多,坏了修,修了坏,很难长期用,只是没人说。"
那一刻,我们恍然大悟:没有什么黑科技,市面上绝大部分所谓的"车载机场",不过是把固定版直接装在了车上而已。
这个行业,还在野蛮发展的阶段。
而命运有时候就是这么奇妙,草莓的工程师团队有来自汽车大厂的基因,时隔多年又来开发跟汽车相关的产品:
"我们搞车载机场,就必须专业,
就必须成为行业标杆。"
CHAPTER 03
“累断”的减振球
我们决定从最扎眼的问题入手:减振球为什么会爆?
最先怀疑的是振幅太大,把减振球"拉爆"了。于是做拉伸测试,想复现故障。
结果出乎意料:就算大幅拉伸,减振球也只会先从连接支架里脱出,而不会被拉爆。
那裂纹到底从哪来?我们换了方向:做高频振动测试。
这一次,问题出现了。减振球出现疲劳断裂,断裂位置和客户反馈的高度吻合。

真相浮出水面
它并非"被拉爆"的,而是"累断"的。
就像你反复折弯一根铁丝,
一次两次看不出变化,
但折一千次,它一定会断。
CHAPTER 04
一套方案,锁住振动
虽然找到了病因,但药方太难开了。
市面上靠谱的车载机场,搭载的往往是 Air 3S、Matrice 4D 级别的小无人机,常见做法是"托住云台"。
但 M400 面对的是极其复杂的工况:云台支架种类多(单云台、双云台、L3 专用云台),转动包络面广,负载差异大,还有各类第三方负载,形状各异,重量不一。

怎么才能用一套系统,固定住这所有千差万别的东西?
我们想过很多疯狂的方案:气垫、微型机械臂,也推翻了无数方案。
有段时间止步不前,整个团队陷入僵局。
"有人提议:"算了吧,让用户开车前自己把云台拆下来,到了再装上。""
但草莓的工程师们并不甘心:如果在这里妥协了,那和那些我们看不上的"不合格"产品,有什么区别?
后来,换了个思路:
既然负载千差万别,就不要从"负载"去固定,从"连接"入手,用更柔性的方式去夹持。最好还是机械联动:不供电、不单独控制,尽可能不给飞机增加额外负载。
最终,在反复试验中,我们设计出了
拉线式云台固定机构
一种不需要额外供电、极其巧妙的结构:
关闭舱门时,它像一根"安全带",
牢牢固定住云台架和减振球;
打开舱门时,它自动松开束缚,
恢复减振球原有的避振功能。
一开一合,刚柔并济。
CHAPTER 05
按住飞机
云台稳了,但机身还在晃。
想象一下:车过减速带,人坐在车上都可能被颠得离开座椅。
那一台挂有负载的 M400 呢?
如果只从底部脚架固定,走坑坑洼洼的山路时,机身晃起来惯性非常大。
长期下来,连接处迟早会变形;再久一点,结构误差累积,整个设备会松松垮垮。
而 SuperDock M400 的抽屉式结构,恰好给了我们一个机会:
利用后退收回的动作,从上方按住飞机。
关门时,联动顶部夹紧机构
把飞机"按住",把云台"顶住"。
一次动作,完成两件事。
CHAPTER 06
以柔克刚
接下来,是那个让人头疼的充电触点。
即便把飞机固定得再牢,车在动,触点会不可避免地持续微摩擦。
长期下来,会导致磨损、电压不稳,甚至出现通讯不稳定的问题。
所以我们做了两件事:
01
触点简化为两个,通讯依靠无线。
尽可能减少多触点带来的不稳定因素。
02
给触点设计了一套"类似汽车悬架"的随动机构。
它能让触点始终跟随无人机位置,把车载前后俯仰、路面起伏的冲击,转移到另一个独立的活动机构里完成。
既然避不开振动,就拥抱振动。
让所有的颠簸和冲击,都由这套机构去消化,
而不是由触点去硬扛。
CHAPTER 07
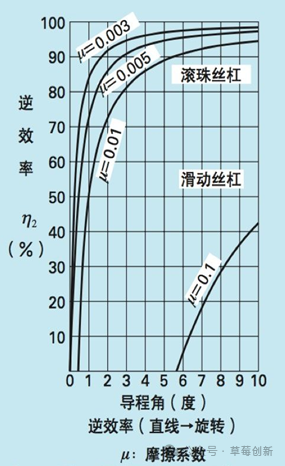
“不可能”滑动的丝杆,滑动了
当我们以为所有问题都已解决时,一个诡异的现象出现了:高频振动测试后,降落平台往外跑了几个毫米。
我们使用的是梯形丝杆,而且是自锁的:导程角小于 5°,理论上逆效率为零,不可能出现滑动。
怀疑电机在振动过程中旋转了?查日志,没有。
怀疑降落平台左右晃动带动了丝杆?进一步固定后再试,问题依旧。
后来,经过数日的排查,发现理论和实践的一个微小区别:
常用的自锁公式,只在静态条件下成立。
那个摩擦系数 μ,是静摩擦系数,而非动摩擦系数。
在高频振动下,摩擦系数会被大幅削弱,自锁条件被悄然打破。
哪怕常规车辆根本达不到测试台上的振动频率,我们也要把这个隐患彻底扼杀。
解决办法:换用更小导程角的丝杆规格。

再次强化高频振动测试,滑动现象彻底消失。
工程的世界里,理论只是地图,路还得靠自己走。
SUMMARY
呼之欲出的答案
所以这次的 SuperDock M400 车载版,是四个优化叠加后的结果:
| 优化点 | 解决问题 |
|---|---|
| 云台固定 | 解决减振球高频爆裂 |
| 机身按压 | 解决结构变形隐患 |
| 随动触点 | 解决触点磨损问题 |
| 真自锁丝杆 | 解决平台振动偏移 |
至此,用户使用车载机场时,和固定机场就没什么区别了。
不用留意这个、小心那个,不用取下飞机,不用取下云台,就正常使用。
这一切对用户来说,都是无感的。
最好的科技,是让你感受不到科技的存在。
尾声
关于初心
讲了这么多技术细节,大家可能会觉得,你们花了这么多精力,解决的都是客户"没投诉"的问题。
确实。
客户提什么,满足就是;
真正拍板的人,未必会亲自开皮卡。
不用的时候让司机把飞机取下来,不是什么大不了的事。
备注一句"建议行车时取下无人机",也能规避所有麻烦。
但,如果我们自己是用户,会觉得这样的产品极为平庸。
我们不想生产一堆工业垃圾,不想做一个仅仅能卖出去的东西。
好的产品,应该让使用它的每一个人,都能感受到被尊重。
尤其在 AI 如此发达的今天,糊一个基本能用的原型实在太容易了。
容易做出来的东西,从来不值得骄傲。
我们想做一个让自己感到骄傲的作品:
把对科技的追求、对美的理解、对未来的向往,都融入设计生产的产品中。
我们希望它有极致的性能,有优雅的设计感:
当用户在最恶劣的环境下,
发现我们预判了他的所有困难,
有一群人曾为他此刻的处境死磕到底,
并给出了完美方案时,
那一刻用户的会心一笑...
这是属于工程师的极致浪漫。
这是 SuperDock M400 车载版。